|
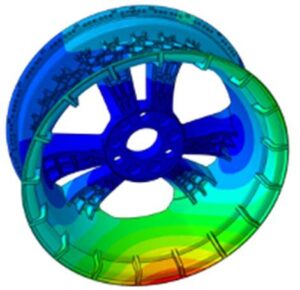
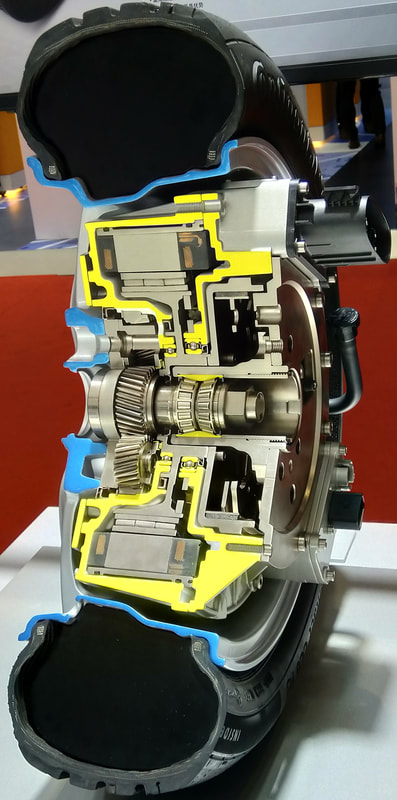
All components required for driving and braking are integrated into a 14-inch wheel rim
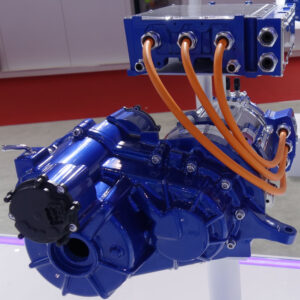
Preassembled drive train
Use of conventional interfaces
Power: 13 kW (continuous), 25 kW (peak)
The nominal torque of 250 Nm per motor can be increased for a brief period of 60 s to 500 Nm maximum
Preassembled drive train
Use of conventional interfaces
Power: 13 kW (continuous), 25 kW (peak)
The nominal torque of 250 Nm per motor can be increased for a brief period of 60 s to 500 Nm maximum

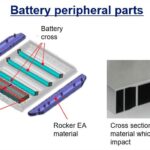
Components
|
Increased usable space
Improved maneuverability
Increased driving pleasure due to dynamic distribution of torque (torque vectoring)
Hydraulic and electric braking for increased safety
Using reducer for high output torque
Advantages for autonomous driving strategies
Improved maneuverability
Increased driving pleasure due to dynamic distribution of torque (torque vectoring)
Hydraulic and electric braking for increased safety
Using reducer for high output torque
Advantages for autonomous driving strategies