The new MLX90513 position sensor from Melexis delivers a ±0.1% full-scale accuracy (±0.36˚ in a rotary implementation with 360˚ range). In addition, its sub-20µs latency, which can be reduced to zero through programming, means that a fast control loop can be implemented – resulting in superior system responsiveness being assured. This inductive-based ASSP exhibits native immunity to stray electromagnetic fields (ISO 11452-8 standard requirements). At the same time, this sensor is not affected by thermal drift in sensitivity.
Output configurability allows position sensing data to be delivered as analog ratiometric, PWM, SENT or SPC signals. This means output protocols relating to numerous different application criteria can be addressed. It is the only inductive position sensor on the market to have an SPC output. The option with 0.5 µs tick time (fast SENT or SPC) is another differentiator, with no other inductive sensor currently able to offer this. The ability to conduct pulse shaping in PWM, SENT and SPC modes proves invaluable since it leads to electromagnetic emission reductions.
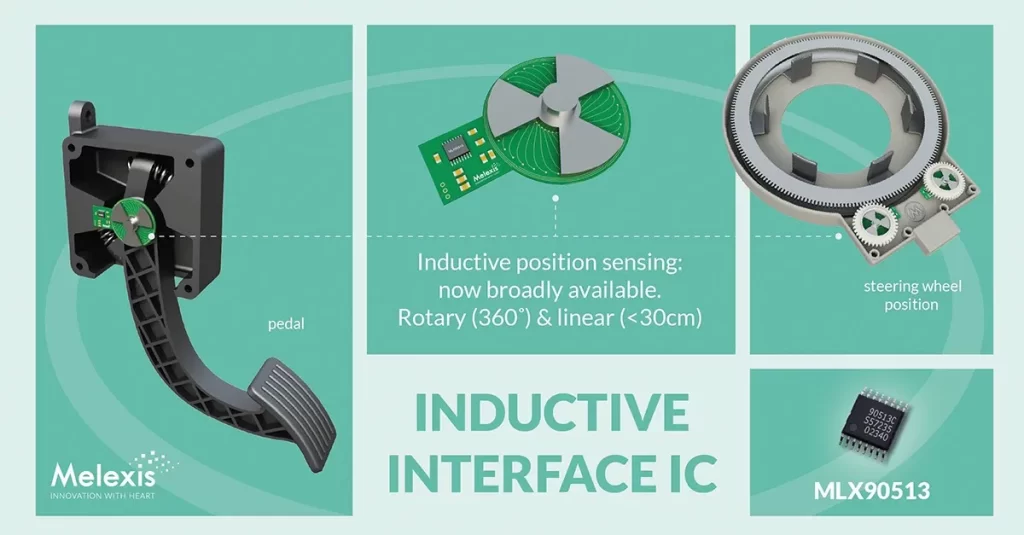
Among the uses of the MLX90513 are:
- throttle/accelerator/brake pedal positioning
- steering wheel angle positioning
- valves or actuators angle positioning
- long stroke length linear applications (up to 30cm)
The importance of functional safety (ISO 26262) has been taken into account, with the sensor supporting up to ASIL D system integration. Additionally, the MLX90513 can be used alongside Melexis’ magnetic sensors to provide system redundancy, as these devices will not interfere with each other (by generating crosstalk).
The MLX90513 is supplied in a compact TSSOP-16 package. A -40oC to +160oC working temperature range permits installation in challenging application environments. The 3-phase coil arrangement employed improves linearity, thanks to harmonic filtering. The device’s 32-point linearization allows equalization of angular non-linearity errors. Over-voltage and reverse polarity protection further underline its operational robustness. Thanks to the use of inductive measurement methods, system implementations can be much more streamlined and integration is easier.