
Bosch Huayu Steering Systems (BHSS) Steering Solution · Evolution Path
- EPS+RWS Coordinated Steering Solution 1.0
- SbW+RWS Active Coordination Steering Solution 2.0
- UNBOUND Steering Solution 3.0
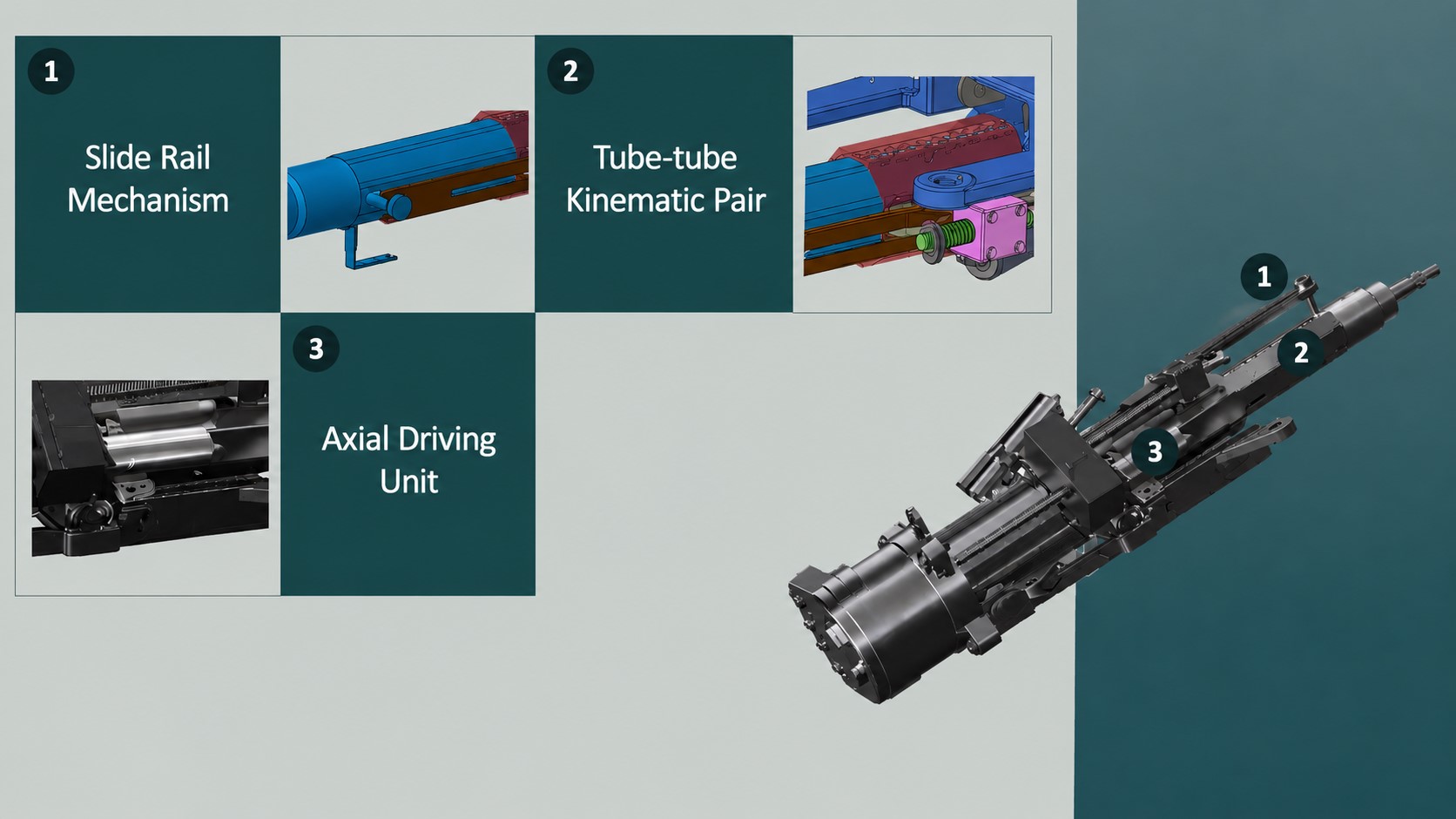
Power Steering Column (Stowable) – Advantages
- Equipped with a Welcome and Yielding Function, it enhances the convenience of entering/exiting the cockpit, optimizes space utilization in non-driving states, and supports multi-scenario cockpit reconfiguration.
- Features a Multi-position memory function that collaborates with seats, air conditioning, and entertainment systems via the CAN network to elevate the personalized cockpit experience.
- With a long stroke design, the steering wheel is fully retractable, creating new cockpit scenarios and interaction possibilities—ideal for SAE L4 and scenarios.
| Basic Design Performance Parameters | |
|---|---|
| Radial Adj. Range | ±2.5° |
| Axial Adj. Range | +35mm, -270mm |
| Total Length (Design) | ≤700mm |
| Radial Adj. Speed | 11~15mm/s |
| Axial Adj. Speed | ≥30mm/s |
| Crash Range | ≥80mm |
| Natural Frequency | ≥50Hz |
| Static Stiffness (V/L) |
vertical ≥ 200N/mm lateral ≥ 200N/mm |
| Retention Force (A/R) |
axial: ≥1200N radial: ≥1200N |
| Operating Noise (RT) | < 39dB |
| Weight (excl. FFU) | < 6.5kg |

4 Wheels Coordination – Reversed Direction as Front Wheel
- Reduce turning radius, and improve vehicle passability
- Reduce inside wheel difference, and improve road safety
- Increase yaw rate gain, and improve steering sensitivity
4 Wheels Coordination – Same Direction as Front Wheel
- Reduction of yaw rate gain, mitigation of transient vehicle spin around the CoG, and improvement of lateral dynamics limits
- Mitigate centrifugal effects, and improve passenger’s comfort during high-speed steering
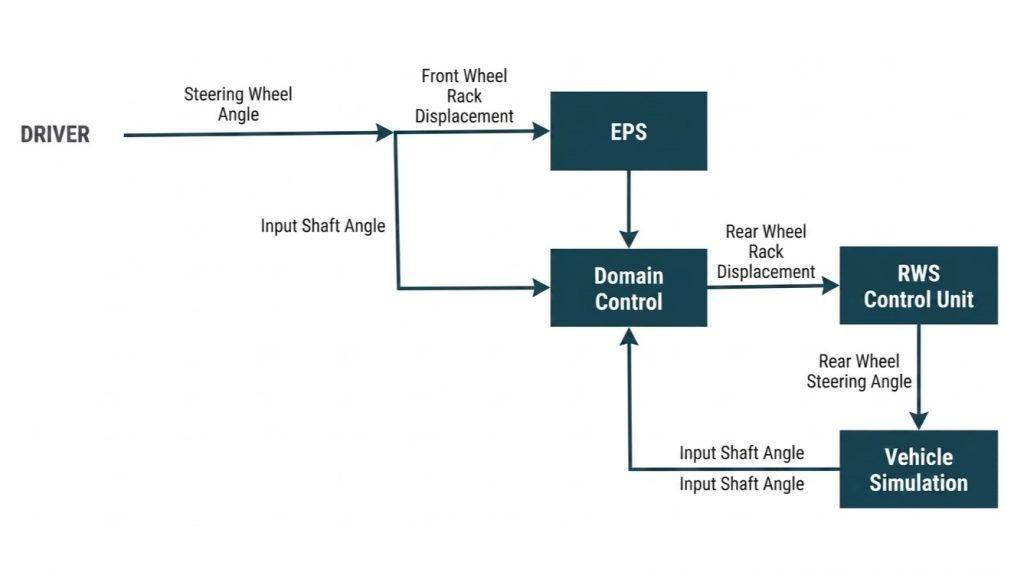
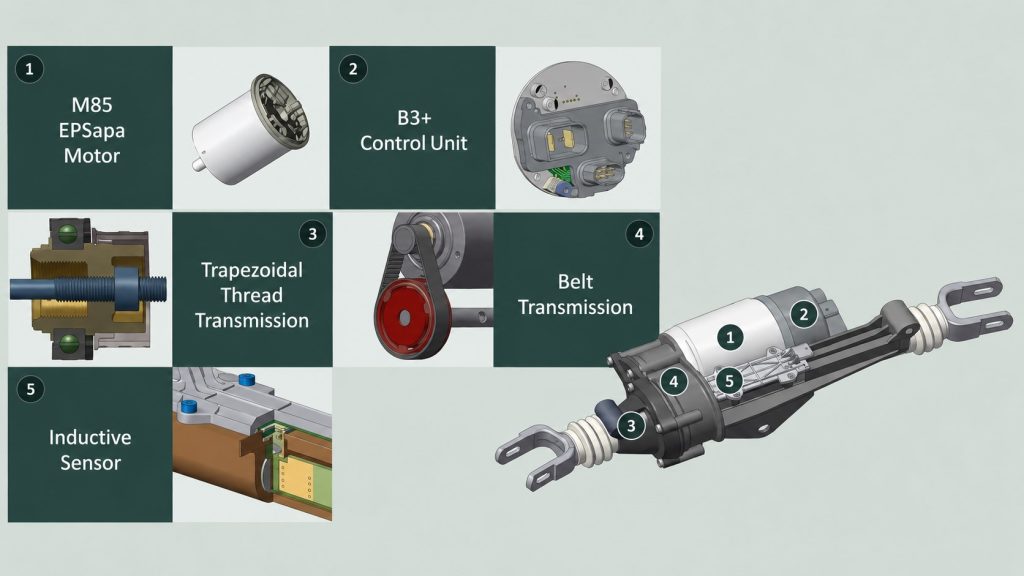
Rear Wheel Steering (RWS) Control Logic
- Aiming at the objectives of zero center-of-mass (CM) sideslip angle and tracking the desired yaw rate, a closed-loop speed-dependent rear-wheel steering control is implemented by integrating the full-vehicle dynamics model.
- Combining the coordinated control of functions such as ABS/ESB, under the condition of having a rear wheel steering angle and a speed difference between two wheels, enables more diverse vehicle motion actions.
| Basic Design Performance Parameters | |
|---|---|
| Driving Rack Force | 15kN @ 20mm/s |
| ECU | CSER B3+ |
| Motor | M85 (8.5Nm) |
| Busbar Current | 160A max |
| Lead Screw Stroke | ±30 mm (Expandable) |
| Applicable Temperature Range | -40~125°C |
| Applicable Voltage Range | 6.5~18V |
| Sealing Class | IP6K9K, IPX7 |
SbW – Advantages
- Software-defined and unified control enables a flexible adjustment of both steering ratio and force feedback characteristics via software parameters, significantly simplifying engineering adaptation work.
- Enhance Flexibility in steering wheel layout on the vehicle cabin structure, creating conditions for flexible adaptation to cockpit interface layout adjustments in different markets globally.
- The steering wheel silence and stowable features create new cockpit scenarios and interaction possibilities for OEMs-providing a more immersive cockpit experience in autonomous driving mode and revolutionizing interior space layout.

| Force Feedback Unit | |
|---|---|
| Sudden LoA | ASIL D |
| SAE | SAE L3 / L4 |
| Max. Feedback Torque | 30+ Nm |
| Power | 2*12V / 48V |
| Vehicle-wide Communication | 2*CAN |
| Internal Communication | IPC / UART |
| Supporting Functions |
Cyber Security CAN Wake Up |


| Steering Rack Actuator | |
|---|---|
| Sudden LoA | ASIL D |
| SAE | SAE L3 / L4 |
| Max. Motor Torque | 8.5 Nm |
| Power | 2*12V / 48V |
| Vehicle-wide Communication | 2*CAN |
| Internal Communication | IPC / UART |
| Supporting Functions |
Cyber Security CAN Wake Up |
| SbW Safety – Redundant and Precise | |
|---|---|
| Functional Safety |
9 Functional Safety Goals
|
| Safety Of The Intended Functionality | For Safety of the Intended Functionality (SOTIF), the Monte Carlo simulation method ensures functional reliability and safety under various operating conditions and parameter combinations throughout the full lifecycle. |
| Heterogeneous Redundancy | RWS act as a redundant backup for SbW through assist in completing the steering in failure emergencies and helping to find a safe position to pull over. |





