For a pleasant driving experience, the longitudinal, lateral and vertical dynamics of a vehicle must be harmoniously coordinated. This is especially true for automated driving, when the driver turns away from active driving and the focus is on comfort. This is where ZF’s cubiX software comes into play: It controls all chassis systems and ensures harmonious acceleration and braking, precise steering, and balanced damping.
In the beginning of 2023, the first production vehicles with the new ZF cubiX software have been rolling on the roads: The Lotus Eletre electric SUV from the Geely Group has been delivered to the first customers since February. From the middle of the year, the vehicle will be available in Europe. ZF’s software controls all chassis functions such as brakes, front and rear axle steering, and active roll stabilizers as well as the electric drive of the new sports car. Further production start-ups of the innovative ZF software will follow from 2023.
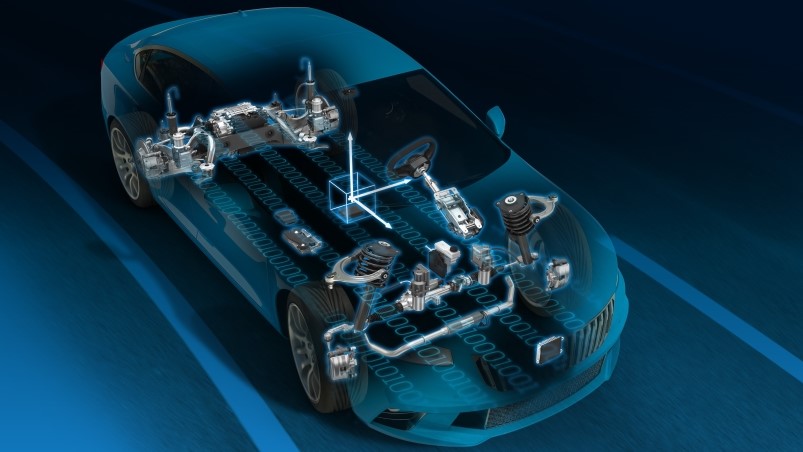
The cubiX control software interlinks and coordinates the active and semi-active actuators with a control algorithm.
The cubiX software optimizes driving behavior with a view to comfort, dynamics and efficiency and also forms the basis for progressive driver assistance systems. As ZF’s first pure software product, cubiX offers another decisive advantage: The platform is compatible with various actuators such as dampers, brakes or rear-axle steering – regardless of the manufacturer or the specific design. This gives manufacturers the flexibility to implement different model series with one and the same control platform without additional integration effort.
Future updates or upgrades to the software can be carried out “over-the-air” – i.e. wirelessly without a visit to the workshop. In this way, the software remains up to date throughout the vehicle’s life, meaning that additional functions can always be added after the vehicle has been delivered.

The ZF software cubiX controls the entire longitudinal, lateral, and vertical dynamics of a vehicle via the interaction of brake and driveline, steering, and suspension.
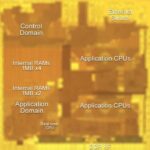
cubiX is an example of a decisive trend on the way to the software-defined vehicle: away from the many individual controls of hardware components, towards overarching domain and zone architectures. This development takes into account the increasing complexity of automotive control software. Until now, dampers, brakes or rear-axle steering have each had their own control unit that has had to be integrated into the overall architecture of the vehicle.