QNX Platform and OS

| FIFO | First in First out |
| POSIX | Portable Operating System Interface standard |
| RTOS | Real-Time Operating System |
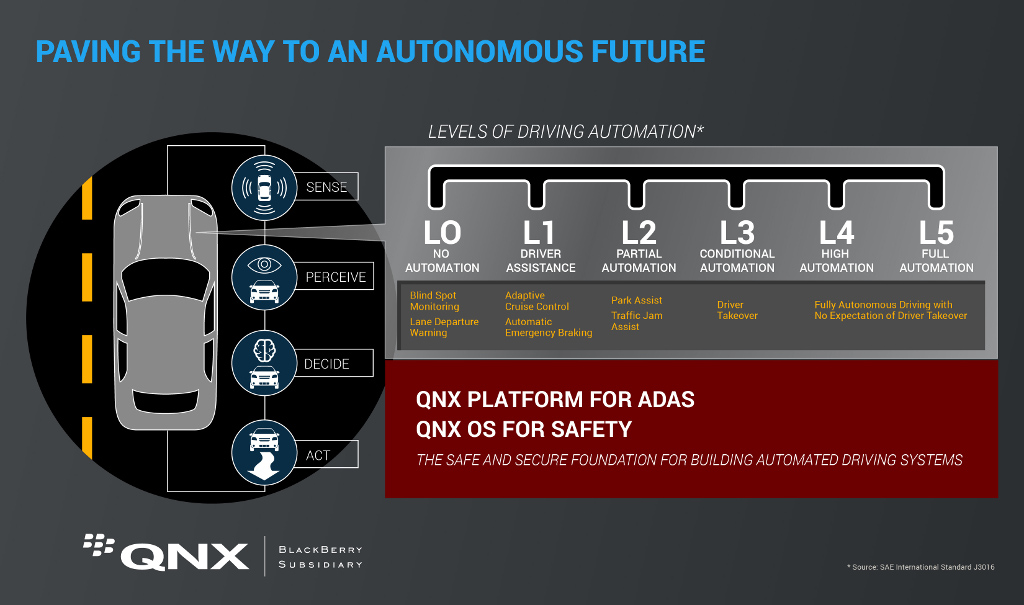
The QNX Platform for ADAS has been built as a foundation to support a variety of ADAS and active safety applications. For example, by combining the multi-camera framework with support for accelerated vision processing and 3D OpenGL ES graphics rendering, a surround view system can be realized. Alternately, a single camera forward facing safety system can be constructed by combining the camera input framework with object detection and recognition algorithms from QNX ecosystem partners.
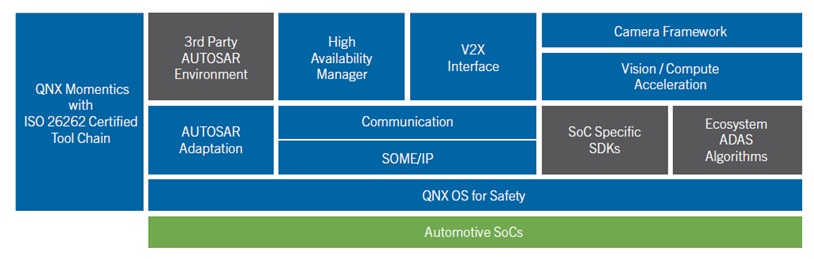
Flexible design that can be used in a variety of vehicle subsystems – for example, the QNX Neutrino OS, a popular OS for infotainment, has a near-identical twin called the QNX OS for Safety, which is certified for use in ISO 26262 systems up to Automotive Safety Integrity Level (ASIL) D; the standard and safety-certified versions use the same, standards-based APIs, enabling customers to maximise software reuse across projects.
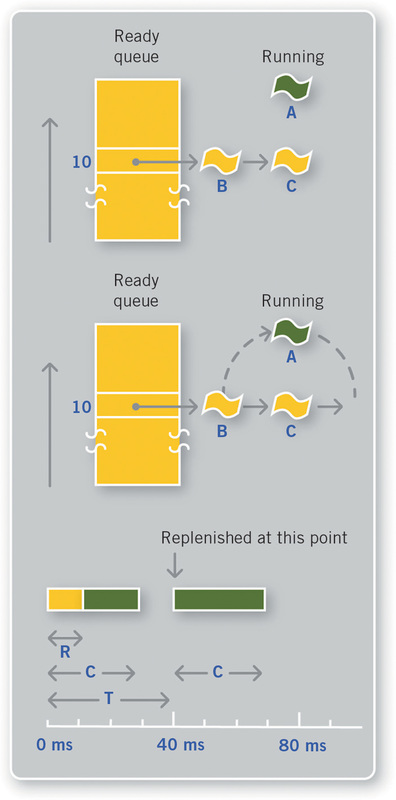
In FIFO scheduling, a thread selected to run continues executing until it:
• voluntarily relinquishes control (e.g., it blocks)
• is preempted by a higher-priority thread
As in FIFO scheduling, a thread using sporadic scheduling continues executing until it blocks or is preempted by a higher-priority thread. And as in adaptive scheduling, a thread using sporadic scheduling will drop in priority, but with sporadic scheduling you have much more precise control over the thread’s behavior.